figure 6.1:
Une métrique euclidienne osculatrice au point $M_{0}(u^{1}_{0},u^{2}_{0},...,u^{n}_{0})$ à la métrique riemannienne (6.3.1), est la métrique définie par l’élément linéaire euclidien :
\begin{equation}
\text{d}\sigma^{2}=\gamma_{ij}\,\text{d}u^{i}\,\text{d}u^{j}
\tag{6.4.1}
\label{6.4.1}
\end{equation}
tel que ses coefficients $\gamma _{ij}$, ainsi que leurs dérivées partielles du premier ordre, aient en $M_{0}$
les mêmes valeurs numériques que celles de l’élément linéaire riemannien donné :
$\text {d}s^{2}=g_{ij}\,\text {d}u^{i}\,\text {d}u^{j}$.
Montrons qu’il existe des métriques euclidiennes osculatrices en déterminant des valeurs telles que, en $M_{0}$, on ait :
\begin{equation}
(a)\,\,\,\,(\gamma_{ij})_{0}=(g_{ij})_{0}\,\,\,\,;\,\,\,\,(b)\,\,\,\,(\partial_{k}\,\gamma_{ij})_{0}=(\partial_{k}\,g_{ij})_{0}
\tag{6.4.2}
\label{6.4.2}
\end{equation}
Pour cela, considérons l’espace euclidien $\varepsilon _{n}$ rapporté à un repère naturel cartésien $(O,\beq {e_{i}})$ où les vecteurs $\mathbf {e_{i}}$ sont définis par les valeurs numériques en $M_{0}$ des coefficients $g_{ij}$ c’est-à-dire tels que l’on ait :
\begin{equation}
\beq{e_{i}}\,\cdot\,\beq{e_{j}}=(g_{ij})_{0}
\tag{6.4.3}
\label{6.4.3}
\end{equation}
D’autre part, cherchons un système de coordonnées $u^{i}$ de l’espace euclidien qui permet de vérifier les relations (6.4.2). Cela est possible de multiple façons ; prenons par exemple la relation suivante entre les coordonnées cartésiennes $x^{i}$ et les coordonnées de surface $u^{i}$ :
\begin{equation}
x^{i}=(u^{i}-u^{i}_{0})+(1/2)\,(\sgammaeq{l}{i}{m})_{0}\,(u^{l}-u^{l}_{0})\,(u^{m}-u^{m}_{0})
\tag{6.4.4}
\label{6.4.4}
\end{equation}
où les $(\sgammaeq {l}{i}{m})$ sont calculés à partir des $g_{ij}$ en utilisant les formules (5.1.39) ; on note $(\sgammaeq {l}{i}{m})_{0}$ leur valeur numérique en $u^{i}=u^{i}_{0}$. Soit $M$ un point quelconque de $\varepsilon _{n}$, de coordonnées $x^{i}$, on a alors la relation suivante en $u^{i}=u^{i}_{0}$ :
\begin{equation}
\bigg(\dfrac{\partial\,\beq{M}}{\partial\,x^{i}}\bigg)_{0}=\bigg(\dfrac{\partial\,\beq{M}}{\partial\,u^{i}}\bigg)_{0}=\beq{e_{i}}
\tag{6.4.5}
\label{6.4.5}
\end{equation}
Par suite du choix fait sur les vecteurs $\mathbf {e_{i}}$ par la relation (6.4.3) et en tenant compte de la métrique (1.3.19), on a :
\begin{equation}
\beq{e_{i}}\,\cdot\,\beq{e_{j}}=(\gamma_{ij})_{0}=(g_{ij})_{0}
\tag{6.4.6}
\label{6.4.6}
\end{equation}
D’autre part, la relation (5.1.32) s’écrit pour un espace euclidien de coordonnées quelconques :
\begin{equation}
\partial_{jk}\,\beq{M}=\partial_{j}\,\beq{e_{k}}=\sgammaeq{j}{l}{k}\,\beq{e_{l}}
\tag{6.4.7}
\label{6.4.7}
\end{equation}
En particulier, pour les coordonnées $u^{i}$ définies par la relation (6.4.4), on obtient pour $u^{i}=u^{i}_{0}$ :
\begin{equation}
(\partial_{jk}\,\beq{M})_{0}=(\partial_{j}\,\beq{e_{k}})_{0}=(\sgammaeq{j}{l}{k})_{0}\,\beq{e_{l}}
\tag{6.4.8}
\label{6.4.8}
\end{equation}
où les dérivations sont faites par rapport aux variables $u^{i}$.
Définissons également des symboles de Christoffel notés $(\sgammaeqtoile {j}{l}{k})$ directement à partir des quantités $\gamma _{ij}$, à l’aide des formules (5.1.39) ; on a également en $u^{i}=u^{i}_{0}$ :
\begin{equation}
(\partial_{jk}\,\beq{M})_{0}=(\sgammaeqtoile{j}{l}{k})\,\beq{e_{l}}
\tag{6.4.9}
\label{6.4.9}
\end{equation}
Les relations (6.4.8) et (6.4.9) étant égales, on obtient l’égalité suivante pour les symboles de Christoffel de seconde espèce, en $u^{i}=u^{i}_{0}$ :
\begin{equation}
(\sgammaeq{j}{l}{k})_{0}=(\sgammaeqtoile{j}{l}{k})_{0}
\tag{6.4.10}
\label{6.4.10}
\end{equation}
De cette dernière égalité résulte l’égalité des symboles de Christoffel de première espèce en $u^{i}=u^{i}_{0}$. La relation (5.1.35), nous donne finalement :
\begin{equation}
(\partial_{k}\,g_{ij})_{0}=(\partial_{k}\,\gamma_{ij})_{0}
\tag{6.4.11}
\label{6.4.11}
\end{equation}
Par suite, l’élément linéaire (6.4.1) de l’espace euclidien, rapporté à ce système de
coordonnées curvilignes $u^{i}$, jouit de la propriété que, pour $u^{i}=u^{i}_{0}$, ses coefficients et leurs dérivées
partielles du premier ordre ont les mêmes valeurs numériques que celles de l’élément
linéaire de l’espace riemannien donné.
Les métriques euclidiennes osculatrices, pour une métrique riemannienne donnée, sont indépendantes du choix des coordonnées. En effet, pour un changement de variables donné, les nouvelles valeurs numériques des $g_{ij}$ et de leurs dérivées partielles du premier ordre sont connues dès que l’on connait les anciennes valeurs numériques de ces mêmes quantités.
Comme on l’a fait remarquer précédemment pour l’espace euclidien tangent, au lieu de
parler de métrique euclidienne osculatrice, on peut parler d’espace euclidien
osculateur.
Les propriétés géométriques de l’espace euclidien osculateur seront des propriétés
géométriques intrinsèques de l’espace de Riemann. Nous allons ainsi pouvoir
définir la différentielle absolue des vecteurs et des tenseurs dans un espace de
Riemann.
Exemple d’espace euclidien osculateur en un point - On a vu qu’une surface $S$,
plongée dans l’espace à trois dimensions, peut être regardée comme un espace riemannien
à deux dimensions. Considérons un point $M$ de la surface $S$ et projetons orthogonalement les
points de la surface sur le plan tangent en $M$. On obtient ainsi une représentation
particulière de $S$ sur un plan euclidien et l’on va voir que la métrique du plan est
osculatrice à celle de la surface.
Pour cela, plaçons le point $M$ à l’origine des coordonnées et choisissons des axes rectangulaires tels que tels que le plan $x,y$, soit le plan tangent à la surface en $M$. L’élément linéaire du plan est donné par :
\begin{equation}
\text{d}\sigma^{2}=\text{d}x^{2}+\text{d}y^{2}
\tag{6.4.12}
\label{6.4.12}
\end{equation}
Celui de la surface, défini par $z=z(x,y)$, s’exprime en fonction des dérivées partielles du
premier ordre de la fonction $z$. C’est un cas particulier de l’expression (6.1.5) avec $u^{1}=x$, $u^{2}=y$,
$z(u^{1},u^{2})=z(x,y)$.
Notons $p=\dfrac {\partial \,z}{\partial \,x}$, $q=\dfrac {\partial \,z}{\partial \,y}$, on a pour l’élément linéaire de la surface $S$ :
\begin{equation}
\text{d}s^{2}=(1+p^{2})\,\text{d}x^{2}+(1+q^{2})\,\text{d}y^{2}+2\,p\,q\,\text{d}x\,\text{d}y
\tag{6.4.13}
\label{6.4.13}
\end{equation}
À l’origine des coordonnées, c’est-à-dire au point $M$, on a : $p=q=0$. Par suite, les coefficients des deux éléments linéaires sont égaux, ainsi que les dérivées partielles du premier ordre de ces coefficients. On a donc ici une interprétation concrète de l’espace euclidien osculateur en un point $M$ ; c’est, dans le cas présent, le plan tangent en $M$ à la surface $S$.
Champ de tenseurs d’un espace riemannien - Nous allons étendre aux espaces de
Riemann les notions d’analyse tensorielle euclidienne relative aux tenseurs attachés à
deux points infiniment voisins. Avant cela, définissons la notion de champ de tenseurs sur
un espace de Riemann.
Pour cela, en chaque point $M$ d’un espace de Riemann $\mathcal {R}_{n}$, faisons correspondre dans
l’espace euclidien osculateur un repère $(m,\beq {e_{i}})$ compatible avec avec la métrique riemannienne en
ce point. Cela permet de se donner les composantes d’un tenseur par rapport à ce repère.
La donnée de ces composantes en chaque point $M$ correspondant de l’espace de Riemann
constitue la donnée du champ de tenseurs.
Ainsi, par exemple, les $g_{ij}$ du tenseur fondamental d’un espace de Riemann,
donnés en chaque point $M$, constituent les composantes covariantes d’un champ de
tenseurs.
Différentielle absolue d’un vecteur - Considérons un champ de vecteurs $\mathbf {V}$ attaché au point $M_{0}$ d’un espace de Riemann. Ces vecteurs ont pour différentielle absolue de leurs composantes contravariantes $v^{i}$, dans l’espace euclidien osculateur, par rapport au repère naturel en $M_{0}$ :
\begin{equation}
(\text{D}\,v^{i})_{0}=(\text{d}v^{i})_{0}+(\omega^{i}_{j})_{0}\,v^{j}_{0}
\tag{6.4.14}
\label{6.4.14}
\end{equation}
avec $(\omega ^{i}_{j})_{0}=(\sgammaeqtoile {k}{i}{j})_{0}\,\text {d}u^{k}$. Les symboles de Christoffel $\sgammaeqtoile {k}{i}{j}$ sont ceux de l’espace euclidien osculateur et ils sont
égaux aux valeurs des symboles de Christoffel $(\sgammaeq {k}{i}{j})_{0}$ calculés à partir de la métrique
riemannienne, en $u^{i}=u^{i}_{0}$.
On est ainsi conduit à l’extension de la notion de différentielle absolue à un espace quelconque de Riemann. Par définition, pour un vecteur $\mathbf {V}$ d’un espace riemannien, la différentielle absolue a pour composantes contravariantes :
\begin{equation}
\text{D}\,v^{i}=\text{d}v^{i}+\omega^{i}_{j}\,v^{j}=\text{d}v^{i}+\sgammaeq{k}{i}{j}\,v^{j}\,\text{d}u^{k}
\tag{6.4.15}
\label{6.4.15}
\end{equation}
Si le champ de vecteurs $\mathbf {v}$ est donné par ses composantes covariantes, sa différentielle absolue a pour composantes covariantes :
\begin{equation}
\text{D}\,v_{i}=\text{d}v_{i}-\omega^{j}_{i}\,v_{j}
\tag{6.4.16}
\label{6.4.16}
\end{equation}
Dérivée covariante - On généralise de même aux espaces de Riemann la notion de dérivée covariante d’un vecteur dont les quantités :
\begin{equation}
\nabla_{k}\,v^{i}=\partial_{k}\,v^{i}+\sgammaeq{k}{i}{j}\,v^{j}
\tag{6.4.17}
\label{6.4.17}
\end{equation}
sont les composantes covariantes du tenseur dérivée covariante, en fonction des
composantes contravariantes $v^{j}$ du vecteur $\mathbf {V}$.
De même, on a les composantes de la dérivée covariante, en fonction des composantes covariantes $v_{i}$ du vecteur $\mathbf {V}$ sous la forme :
\begin{equation}
\nabla_{k}\,v_{i}=\partial_{k}\,v_{i}-\sgammaeq{k}{j}{i}\,v_{j}
\tag{6.4.18}
\label{6.4.18}
\end{equation}
Les formules donnant la différentielle absolue et la dérivée covariante des tenseurs euclidiens sont généralisées de la même façon aux tenseurs riemanniens.
Définitions - Deux vecteurs d’origines infiniment voisines $M$ et $M'$ sont dits équipollents s’ils
sont équipollents dans l’espace euclidien osculateur en $M$.
Dans l’espace euclidien, les vecteurs étant parallèles, de même sens et de même longueur, leur différence géométrique est nulle. Par suite, dans l’espace de Riemann, la différentielle absolue du vecteur situé en $M$ est nulle. Les conditions d’équipollence d’un vecteur $\mathbf {V}$ de composantes contravariantes $v^{i}$ sont donc :
\begin{equation}
\text{D}\,v^{i}=\text{D}\,v_{i}=0
\tag{6.4.19}
\label{6.4.19}
\end{equation}
Transporter par équipollence un vecteur $\mathbf {V}$ d’origine $M$ en un point infiniment voisin $M'$,
c’est construire le vecteur $\mathbf {V'}$, d’origine $M'$, équipollent à $\mathbf {V}$. On dira encore que l’on effectue un
transport parallèle.
Exemple - En géométrie euclidienne, la notion de parallélisme de deux vecteurs peut
être définie en considérant l’angle que font ces vecteurs par rapport à une même droite. Si
leur direction fait un même angle $\alpha $ avec une même droite, deux vecteurs sont parallèles au
sens euclidien du terme.
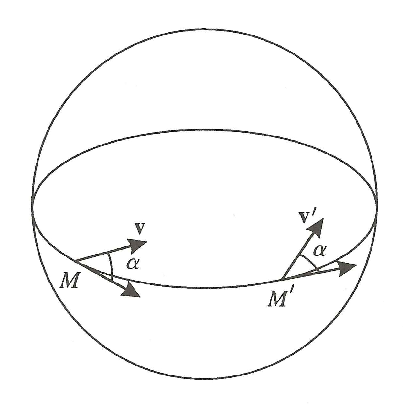
Voyons ce qu’il en est pour un espace de Riemann. Considérons, par exemple, une
sphère sont un grand cercle passe par deux points $M$ et $M'$ (Fig.6.1). Deux vecteurs $\mathbf {v}$ et $\mathbf {v'}$,
localisés respectivement aux points $M$ et $M'$, situés dans des plans tangents à la sphère, sont
précisément situés dans l’espace euclidien osculateur à la surface sphérique en chaque
point.
Si ces deux vecteurs forment un même angle $\alpha $ avec les tangentes en $M$ et $M'$ à l’arc de grand cercle passant par ces deux points, on dira qu’ils sont parallèles sur la sphère. On aboutit ainsi à la généralisation de la notion de parallélisme sur une surface de Riemann. Lorsque ces deux vecteurs ont même module, on dira qu’ils sont équipollents.
Les géodésiques constituent, pour les espaces de Riemann, la généralisation des droites de
l’espace euclidien. Par définition, les géodésiques constituent les extrémales de la
longueur des arcs de courbe joignant deux points déterminés ; leur équation est donnée
par la même relation (5.1.60) que pour les espaces euclidiens, la démonstration étant
identique puisque seuls les $g_{ij}$ diffèrent.
On peut obtenir l’équation des géodésiques par des considérations d’ordre cinématique, par analogie avec la mécanique classique. Considérons dans un espace de Riemann de coordonnées $u^{i}$, un point mobile $M$ qui se déplace en fonction d’un paramètre $t$ qui représente, par exemple, le temps. Le vecteur vitesse $\mathbf {V}$ du point $M$ a pour composantes contravariantes :
\begin{equation}
v^{i}=\dfrac{\text{d}u^{i}}{\text{d}t}
\tag{6.4.21}
\label{6.4.21}
\end{equation}
et les composantes contravariantes du vecteur accélération sont données par :
\begin{equation}
a^{i}=\dfrac{\text{d}v^{i}}{\text{d}t}=\dfrac{\text{d}^{2}u^{i}}{\text{d}t^{2}}+\sgammaeq{k}{i}{j}\,\dfrac{\text{d}u^{j}}{\text{d}t}\,\dfrac{\text{d}u^{k}}{\text{d}t}
\tag{6.4.22}
\label{6.4.22}
\end{equation}
Si le mobile a une accélération constamment nulle, alors sa différentielle absolue $\text {d}v^{i}$ est nulle. Par suite, sa vitesse est constamment équipollente à elle-même. Dans l’espace euclidien, les trajectoires parcourues par un tel mobile sont des droites. Dans un espace de Riemann, les trajectoires de ce mobile vont être des courbes appelées les géodésiques de l’espace riemannien. Les géodésiques constituent donc la généralisation, en géométrie riemannienne, des droites de l’espace euclidien. En écrivant $a^{i}=0$ dans l’équation (6.4.22), on obtient ainsi l’équation des géodésiques.