figure 2.1:
On effectue un changement de base d’un espace vectoriel $E_{2}$, défini par :
\begin{equation*}
\beq{e’_{1}}=3\,\beq{e_{1}}+\beq{e_{2}}\,\,\,\,;\,\,\,\,\beq{e’_{2}}=-\beq{e_{1}}+2\,\beq{e_{2}}
\tag{2.4.1}
\end{equation*}
\begin{equation*}
g’_{11}=\beq{e’_{1}}\,\cdot\,\beq{e’_{1}}=(3\,\beq{e_{1}}+\beq{e_{2}})^{2}=9\,(\beq{e_{1}})^{2}+6\,(\beq{e_{1}}\,\cdot\,\beq{e_{2}})+(\beq{e_{2}})^{2}=9\,g_{11}+6\,g_{12}+g_{22}
\tag{2.4.2}
\end{equation*}
\begin{equation*}
g’_{12}=-3\,g_{11}+5\,g_{12}+2\,g_{22}=g’_{21}\,\,\,\,;\,\,\,\,g’_{22}=g_{11}-4\,g_{12}+4\,g_{22}
\tag{2.4.3}
\end{equation*}
\begin{equation*}
\beq{e’_{k}}=A^{i}_{k}\,\beq{e_{i}}
\tag{2.4.4}
\end{equation*}
donne dans le cas présent : $A^{1}_{1}=3\,\,\,;\,\,\,A^{2}_{1}=1\,\,\,;\,\,\,A^{1}_{2}=-1\,\,\,;\,\,\,A^{2}_{2}=2$
La formule de changement de base (2.2.2)(b) d’un tenseur d’ordre deux :
\begin{equation*}
t’_{kl}=A^{i}_{k}\,A^{j}_{l}\,t_{ij}
\tag{2.4.5}
\end{equation*}
nous donne, par exemple :
\begin{equation*}
g’_{11}=A^{1}_{1}\,A^{1}_{1}\,g_{11}+A^{1}_{1}\,A^{2}_{1}\,g_{12}+A^{2}_{1}\,A^{1}_{1}\,g_{21}+A^{2}_{1}\,A^{2}_{1}\,g_{22}=9\,g_{11}+6\,g_{12}+g_{22}
\tag{2.4.6}
\end{equation*}
On vérifie de même les autres expressions de $g'_{ij}$.
On considère un espace vectoriel $E_{3}$ à trois dimensions. Partant de la formule (1.5.45) : $g_{ik}\,g^{kj}=\delta _{ij}$, démontrer que pour des vecteurs de base orthogonaux, on a :
\begin{equation*}
g^{ik}=\dfrac{1}{g_{ik}}\,\,\,\,\,\text{lorsque}\,\,\,i=k
\tag{2.4.7}
\end{equation*}
Selon la formule (1.5.45) : $g_{ik}\,g^{kj}=\delta _{ij}$, pour $i=j=1$, on obtient :
\begin{equation*}
g_{11}\,g^{11}+g_{12}\,g^{21}+g_{13}\,g^{31}=1
\tag{2.4.8}
\end{equation*}
Si les vecteurs de base sont orthogonaux, on a : $g_{12}=g_{21}=0$ ; $g_{13}=g_{31}=0$ ; il reste donc :
\begin{equation*}
g_{11}\,g^{11}=1\,\,\,\,\,\text{d’o\‘u}\,\,\,g^{11}=\dfrac{1}{g_{11}}
\tag{2.4.9}
\end{equation*}
On démontre de même les autres relations : $g^{22}=\dfrac {1}{g_{22}}$ ; $g^{33}=\dfrac {1}{g_{33}}$
Soit un espace vectoriel $E_{2}$ ayant pour base {$\beq {e_{1}},\beq {e_{2}}$}. On considère deux vecteurs : $\beq {x}=4\,\beq {e_{1}}+3\,\beq {e_{2}}$ et $\beq {y}=\beq {e_{1}}+5\,\beq {e_{2}}$.
\begin{equation*}
\begin{bmatrix}
\beq{e’_{1}}\\
\beq{e’_{2}}
\end{bmatrix}=\begin{bmatrix}
\text{cos}\,\alpha & \text{sin}\,\alpha \\
-\text{sin}\,\alpha & \text{cos}\,\alpha
\end{bmatrix}=\begin{bmatrix}
\beq{e_{1}}\\
\beq{e_{2}}
\end{bmatrix}
\tag{2.4.10}
\end{equation*}
Déterminer les nouvelles composantes contravariantes du produit tensoriel.
\begin{equation*}
u^{11}=x^{1}\,y^{1}=4\,\,\,\,;\,\,\,\,u^{12}=x^{1}\,y^{2}=20\,\,\,\,;\,\,\,\,u^{21}=x^{2}\,y^{1}=3\,\,\,\,;\,\,\,\,u^{22}=x^{2}\,y^{2}=15
\tag{2.4.11}
\end{equation*}
La matrice du produit tensoriel est donnée par :
\begin{equation*}
[u^{ij}]=\begin{bmatrix}
u^{11}&u^{12}\\
u^{21}&u^{22}
\end{bmatrix}=\begin{bmatrix}
4 & 20 \\
3 & 15
\end{bmatrix}
\tag{2.4.12}
\end{equation*}
\begin{equation}
u’^{kl}=A’^{k}_{i}\,A’^{l}_{j}\,u^{ij}
\tag{2.4.13}
\end{equation}
les quantités $A'^{k}_{i}$ sont données par la matrice de changement de base. On a :
\begin{equation}
A’^{1}_{1}=\text{cos}\,\alpha\,\,\,\,;\,\,\,\,A’^{2}_{1}=-\text{sin}\,\alpha\,\,\,\,;\,\,\,\,A’^{1}_{2}=\text{sin}\,\alpha\,\,\,\,;\,\,\,\,A’^{2}_{2}=\text{cos}\,\alpha
\tag{2.4.14}
\end{equation}
d’où :
\begin{equation}
u’^{11}=A’^{1}_{1}\,A’^{1}_{1}\,u^{11}+A’^{1}_{1}\,A’^{1}_{2}\,u^{12}+A’^{1}_{2}\,A’^{1}_{1}\,u^{21}+A’^{1}_{2}\,A’^{1}_{2}\,u^{22}
\tag{2.4.15}
\end{equation}
\begin{equation}
=4\,\text{cos}^{2}\,\alpha+23\,\text{cos}\,\alpha\,\text{sin}\,\alpha+15\,\text{sin}^{2}\,\alpha
\tag{2.4.16}
\end{equation}
\begin{equation}
u’^{12}=11\,\text{sin}\,\alpha\,\text{cos}\,\alpha+20\,\text{cos}^{2}\,\alpha-3\,\text{sin}^{2}\,\alpha
\tag{2.4.17}
\end{equation}
\begin{equation}
u’^{21}=11\,\text{sin}\,\alpha\,\text{cos}\,\alpha-20\,\text{sin}^{2}\,\alpha+3\,\text{cos}^{2}\,\alpha
\tag{2.4.18}
\end{equation}
\begin{equation}
u’^{22}=4\,\text{sin}^{2}\,\alpha-23\,\text{sin}\,\alpha\,\text{cos}\,\alpha+15\,\text{cos}^{2}\,\alpha
\tag{2.4.19}
\end{equation}
\begin{equation*}
[u’^{ij}]=\begin{bmatrix}
u’^{11}&u’^{12}\\
u’^{21}&u’^{22}
\end{bmatrix}=\begin{bmatrix}
15 & -3 \\
-20 & 4
\end{bmatrix}
\tag{2.4.20}
\end{equation*}
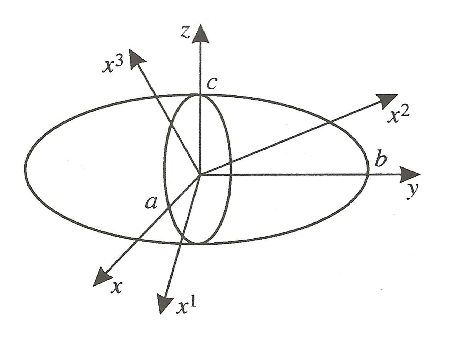
On considère dans l’espace géométrique ordinaire, de coordonnées cartésiennes $x,y,z$, un ellipsoïde centré sur l’origine et dont les axes coïncident avec ceux du référentiel cartésien (Fig.2.1). Si $a,b,c$ sont les longueurs des demi-axes de l’ellipsoïde, son équation est :
\begin{equation*}
\dfrac{x^{2}}{a^{2}}+\dfrac{y^{2}}{b^{2}}+\dfrac{z^{2}}{c^{2}}=1
\tag{2.4.21}
\end{equation*}
\begin{equation*}
a_{ij}\,x^{i}\,x^{j}=1
\tag{2.4.23}
\end{equation*}
avec $a_{ij}=a_{ji}$ et $i,j=1,2,3$.
\begin{equation*}
x=A^{1}_{k}\,x^{k}\,\,\,\,;\,\,\,\,y=A^{2}_{k}\,x^{k}\,\,\,\,;\,\,\,\,z=A^{3}_{k}\,x^{k}
\tag{2.4.24}
\end{equation*}
L’équation de l’ellipsoïde devient après le changement de référentiel :
\begin{equation*}
\dfrac{(A^{1}_{k}\,x^{k})^{2}}{a^{2}}+\dfrac{(A^{2}_{k}\,x^{k})^{2}}{b^{2}}+\dfrac{(A^{3}_{k}\,x^{k})^{2}}{c^{2}}=1
\tag{2.4.25}
\end{equation*}
Développons l’expression $(A^{1}_{k}\,x^{k})^{2}$ par exemple ; il vient :
\begin{equation*}
(A^{1}_{k}\,x^{k})^{2}=(A^{1}_{1}\,x^{1}+A^{1}_{2}\,x^{2}+A^{1}_{3}\,x^{3})^{2}
\tag{2.4.26}
\end{equation*}
\begin{equation*}
=(A^{1}_{1}\,x^{1})^{2}+(A^{1}_{2}\,x^{2})^{2}+(A^{1}_{3}\,x^{3})^{2}+2\,A^{1}_{1}\,x^{1}\,A^{1}_{2}\,x^{2}+2\,A^{1}_{1}\,x^{1}\,A^{1}_{3}\,x^{3}+2\,A^{1}_{2}\,x^{2}\,A^{1}_{3}\,x^{3}
\tag{2.4.27}
\end{equation*}
Regroupons tous les termes, on obtient une équation de la forme :
\begin{equation*}
a_{ij}\,x^{i}\,x^{j}=1\,\,\,\,\,\,\text{avec, par exemple}\,\,\,\,\,a_{11}=(A^{1}_{1}/a)^{2}+(A^{2}_{1}/b)^{2}+(A^{3}_{1}/c)^{2}
\tag{2.4.28}
\end{equation*}
On vérifie aisément que les coefficients sont symétriques, c’est-à-dire tels que : $a_{ij}=a_{ji}$.
\begin{equation*}
a_{ij}\,x^{i}\,x^{j}=a_{ij}\,A^{i}_{k}\,x’^{k}\,A^{j}_{m}\,x’^{m}=a’_{km}\,x’^{k}\,x’^{m}=1
\tag{2.4.29}
\end{equation*}
Dans le nouveau système d’axes, les coefficients de l’ellipsoïde sont donnés par :
\begin{equation*}
a’_{km}=a_{ij}\,A^{i}_{k}\,A^{j}_{m}
\tag{2.4.30}
\end{equation*}
C’est la formule de transformation (2.2.2) des composantes covariantes d’un tenseur d’ordre deux. On dira que la surface représentée par l’équation $a_{ij}\,x^{i}\,x^{j}=1$ est l’ellipsoïde représentatif du tenseur $a_{ij}$ (en pratique, on désigne souvent un tenseur par l’expression générale de ses composantes).
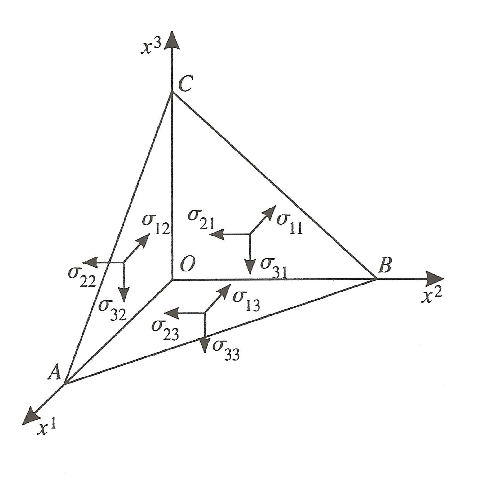
On considère un tétraèdre $OABC$ (Fig.2.2) constitué d’un milieu continu, fluide ou solid, situé à l’intérieur de ce milieu et supposé en équilibre statique. Chaque face du tétraèdre est soumise à une force interne due au milieu lui-même et proportionnelle à l’aire de sa surface. On note les aires des faces :
\begin{equation*}
S_{1}=S(OBC)\,\,\,\,\,\,;\,\,\,\,\,\,S_{2}=S(OAC)
\tag{2.4.31}
\end{equation*}
\begin{equation*}
S_{3}=S(OAB)\,\,\,\,\,\,;\,\,\,\,\,\,S_{4}=S(ABC)
\tag{2.4.32}
\end{equation*}
\begin{equation*}
f_{1i}=\sigma_{1i}\,S_{i}\,\,\,\,;\,\,\,\,f_{2i}=\sigma_{2i}\,S_{i}\,\,\,\,;\,\,\,\,f_{3i}=\sigma_{3i}\,S_{i}\,\,\,\,\text{avec}\,\,\,i=1,2,3
\tag{2.4.34}
\end{equation*}
Soit $\mathbf {F}$ la force qui s’exerce par unité d’aire ($\mathbf {F}$ est appelée la contrainte) sur la face $ABC$ et soit $F_{i}$ ses composantes. En écrivant l’équilibre des forces qui s’exercent sur les quatres faces du tétraèdre, montrer qu’on a :
\begin{equation*}
F_{i}=\sigma_{ij}\,n_{j}\,\,\,\,;\,\,\,\,i,j=1,2,3
\tag{2.4.35}
\end{equation*}
Que peut-on en déduire pour les neufs quantités $\sigma _{ij}$ ?
\begin{equation*}
\beq{S_{T}}=S_{1}\,\beq{i}+S_{2}\,\beq{j}+S_{3}\,\beq{k}
\tag{2.4.36}
\end{equation*}
où $\mathbf {i}$, $\mathbf {j}$, $\mathbf {k}$ sont les vecteurs de base orthonormés. Le vecteur $\mathbf {n}$ a donc pour composantes :
\begin{equation*}
n_{1}=S_{1}/S_{T}\,\,\,\,;\,\,\,\,n_{2}=S_{2}/S_{T}\,\,\,\,;\,\,\,\,n_{3}=S_{3}/S_{T}
\tag{2.4.37}
\end{equation*}
\begin{equation*}
F_{1}\,S_{T}=f_{11}+f_{12}+f_{13}=\sigma_{11}\,S_{1}+\sigma_{12}\,S_{2}+\sigma_{13}\,S_{3}
\tag{2.4.38}
\end{equation*}
d’où : $F_{1}=\sigma _{11}\,n_{1}+\sigma _{12}\,n_{2}+\sigma _{13}\,n_{3}$
On obtient de même :
\begin{equation*}
F_{2}=\sigma_{21}\,n_{1}+\sigma_{22}\,n_{2}+\sigma_{23}\,n_{3}\,\,\,\,\,\,;\,\,\,\,\,\,F_{3}=\sigma_{31}\,n_{1}+\sigma_{32}\,n_{2}+\sigma_{33}\,n_{3}
\tag{2.4.39}
\end{equation*}
Finalement, on a :
\begin{equation*}
F_{i}=\sigma_{ij}\,n_{j}\,\,\,;\,\,\,i,j=1,2,3
\tag{2.4.40}
\end{equation*}
On obtient une relation entre deux vecteurs $\mathbf {F}$ et $\mathbf {n}$ de la forme (2.3.27). Nous avons vu que les quantités $\sigma _{ij}$ se transforment dans ce cas comme les composantes mixtes d’un tenseur d’ordre deux, selon la relation (2.3.31). Pour des vecteurs de base quelconques, les quantités $\sigma _{ij}$ doivent être écrites $\sigma ^{i}_{j}$. Le tenseur $\sigma ^{i}_{j}$ est appelé le tenseur des contraintes. Le terme de tenseur vient précisément de l’étude des tensions internes existant au sein des milieux continus.
L’expression des composantes $I_{ij}$ du tenseur d’inertie d’une particule de masse $m$ par rapport à un axe passant par l’origine d’un référentiel cartésien $K$, est donnée par la formule (2.3.7).
\begin{equation*}
\mathscr{M}_{u}=m\,[\beq{r}^{2}-(\beq{r}\,\cdot\,\beq{u})^{2}]
\tag{2.4.41}
\end{equation*}
où $\mathbf {r}$ est le rayon vecteur partant du point d’origine $O$ situé sur l’axe $U$ et aboutissant au point $M$ où se trouve la particule.
\begin{equation*}
T=\dfrac{1}{2}\,\mathscr{M}_{u}\,\boldsymbol\omega^{2}
\tag{2.4.42}
\end{equation*}
où $\mathscr {M}_{u}$ est le moment d’inertie de la particule par rapport à l’axe instantané de rotation de direction $\boldsymbol \omega $. Exprimer $T$ en fonction des composantes $I_{ij}$.
\begin{equation*}
\mathscr{M}_{u}=a’_{i}\,a’_{j}\,I_{ij}
\tag{2.4.43}
\end{equation*}
où les $a'_{k}$ sont les cosinus directeurs de la droite portant le vecteur $\mathbf {u}$. Mais les $a'_{k}$ sont donnés par :
\begin{equation*}
a’_{k}=\beq{u}\,\cdot\,\beq{i_{k}}=u_{k}
\tag{2.4.44}
\end{equation*}
où les vecteurs $\mathbf {i_{k}}$ , $k=1,2,3$, sont les vecteurs unitaires de base du référentiel $K'$. On a donc :
\begin{equation*}
\mathscr{M}_{u}=u_{i}\,u_{j}\,I_{ij}
\tag{2.4.45}
\end{equation*}
\begin{equation*}
\mathscr{M}_{u}=m\,[x_{k}\,x_{k}-(x_{k}\,u_{k})^{2}]
\tag{2.4.46}
\end{equation*}
Le carré du rayon vecteur : $\beq {r}^{2}=x_{k}\,x_{k}$ ainsi que le produit scalaire : $\beq {r}\,\cdot \,\beq {u}=x_{k}\,u_{k}$ permettent d’écrire l’expression de $\mathscr {M}_{u}$ sous la forme demandée :
\begin{equation*}
\mathscr{M}_{u}=m\,[\beq{r}^{2}-(\beq{r}\,\cdot\,\beq{u})^{2}]
\tag{2.4.47}
\end{equation*}
\begin{equation*}
T=\dfrac{1}{2}\,m\,\beq{v}^{2}=\dfrac{1}{2}\,m(\boldsymbol\omega\,\times\,\beq{r})^{2}
\tag{2.4.48}
\end{equation*}
Utilisant les propriétés du produit scalaire et du double produit vectoriel, il vient :
\begin{equation*}
T=\dfrac{1}{2}\,m\,\boldsymbol\omega(\beq{r}\,\times\,\boldsymbol\omega\,\times\,\beq{r})=\dfrac{1}{2}\,m\,[\beq{r}^{2}\,\boldsymbol\omega^{2}-(\beq{r}\,\cdot\,\boldsymbol\omega)^{2}]
\tag{2.4.49}
\end{equation*}
Le vecteur $\boldsymbol \omega $ ayant un module $\omega $ égal à la vitesse angulaire, utilisons le vecteur unitaire :
\begin{equation*}
\boldsymbol\omega_{0}=\dfrac{\boldsymbol\omega}{\omega}
\tag{2.4.50}
\end{equation*}
Il vient :
\begin{equation*}
T=\dfrac{1}{2}\,m\,\omega^{2}[\beq{r}^{2}-(\beq{r}\,\cdot\,\boldsymbol\omega_{0})^{2}]
\tag{2.4.51}
\end{equation*}
L’expression du moment d’inertie $\mathscr {M}_{\omega }$ apparaît dans l’énergie cinétique ci-dessus, d’où :
\begin{equation*}
T=\dfrac{1}{2}\,\mathscr{M}_{\omega}\,\omega^{2}
\tag{2.4.52}
\end{equation*}
L’utilisation de l’expression du moment d’inertie dans le (1) donne alors :
\begin{equation*}
T=\dfrac{1}{2}\,\mathscr{M}_{\omega}\,\omega^{2}=\dfrac{1}{2}\,I_{ij}\,\omega_{0i}\,\omega_{0j}\,\omega^{2}=\dfrac{1}{2}\,I_{ij}\,\omega_{i}\,\omega_{j}
\tag{2.4.53}
\end{equation*}
où les $\omega _{k}$ , $k=1,2,3$, sont les composantes de $\boldsymbol \omega $ et les $I_{ij}$, les composantes du tenseur d’inertie par rapport au point $P$.
Sous l’effet d’une contrainte, certains cristaux sont le siège d’un moment électrique dont l’intensité est proportionnelle à la contrainte appliquée. C’est l’effet piézo-électrique direct. Les calculs suivants sont à effectuer dans des référentiels cartésiens.
\begin{equation}
P_{1}=d_{11k}\,\sigma_{1k}+d_{12k}\,\sigma_{2k}+d_{13k}\,\sigma_{3k}\,\,\,;\,\,\,k=1,2,3
\tag{2.4.54}
\label{2.4.54}
\end{equation}
où les coefficients $d_{ijk}$ sont des constantes.
\begin{equation}
P_{1}=d_{1jk}\,\sigma_{jk}
\tag{2.4.55}
\label{2.4.55}
\end{equation}
Remplaçant dans la relation (2.4.55), l’indice $1$ par un indice quelconque, $l$ par exemple, valant $1,2$ ou $3$, on obtient :
\begin{equation}
P_{l}=d_{lmn}\,\sigma_{mn}
\tag{2.4.56}
\label{2.4.56}
\end{equation}
\begin{equation}
P’_{i}=d’_{ijk}\,\sigma’_{jk}
\tag{2.4.57}
\label{2.4.57}
\end{equation}
Les composantes du vecteur polarisation $\mathbf {P}$ sont liées entre elles dans les deux référentiels, selon la formule (1.3.16), par :
\begin{equation}
P’_{i}=A’^{i}_{l}\,P_{l}
\tag{2.4.58}
\label{2.4.58}
\end{equation}
Lors d’un changement de référentiel, les $\sigma '_{ij}$ sont liés aux $\sigma _{kl}$, selon la formule (2.2.2), par :
\begin{equation}
\sigma_{mn}=A’^{j}_{m}\,A’^{k}_{n}\,\sigma’_{jk}
\tag{2.4.59}
\label{2.4.59}
\end{equation}
Reportant les relations (2.4.56) et (2.4.59) dans l’expression (2.4.58), il vient :
\begin{equation}
P’_{i}=A’^{i}_{l}\,P_{l}=A’^{i}_{l}\,d_{lmn}\,\sigma_{mn}=A’^{i}_{l}\,d_{lmn}\,A’^{j}_{m}\,A’^{k}_{n}\,\sigma’_{jk}
\tag{2.4.60}
\label{2.4.60}
\end{equation}
Comparant les relations (2.4.57) et (2.4.60), on obtient par identification des coefficients :
\begin{equation*}
d’_{ijk}=A’^{i}_{l}\,A’^{j}_{m}\,A’^{k}_{n}\,d_{lmn}
\tag{2.4.61}
\label{2.4.61}
\end{equation*}
On retrouve la propriété de changement de base d’un tenseur d’ordre trois donnée par la formule (2.2.15) en tenant compte du fait que les composantes mixtes, covariantes et contravariantes sont confondues pour des repères cartésiens.